
Smart Maintenance Lab
The Rolling Stock Maintenance Robotics Lab is a mini ‘depot of the future’, for research into the use of robotics for train maintenance.
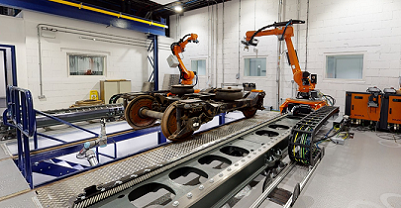
The Robotics Lab is part of the ERDF Smart Rolling Stock Maintenance Research Facility (SRSMRF) and represents a short section of a typical train depot maintenance road including an inspection pit. It provides the test bench to demonstrate the SRSMRF’s concepts for robotic train maintenance and includes two Kuka KR50 robots mounted on linear tracks and a UR10 robot mounted on a linear track in the inspection pit. The whole robot cell is controlled through a Siemens PLC.
Whilst the use of industrial robots and collaborative robots is now becoming widespread in the manufacturing industry, they have so far not been applied to train maintenance. The purpose of this lab is to develop the appropriate techniques for the use of robotics in train maintenance and demonstrate these techniques in a controlled environment.
The lab also includes various small-size electronic devices, sensors, boards, processors, and microcontrollers to develop different smart devices for gathering asset condition data that can be used to inform the control of the robots.
Robots applied to train maintenance could be required to carry out a range of different tasks, therefore the robots in the lab have a range of end effectors that they can change automatically with a tool changer. This allows the end effector to be change during a robot programme.
Inspection and train condition assessment are an important application of robotics in train maintenance. To facilitate this the lab has a Keyence Vision System including a 21-megapixel camera and image recognition software and a Keyence laser scanner, both of these can be mounted to any one of the 3 robot arms.
Initial research focuses on the integration of sensor inputs, from the vision system and laser scanners, with the control of a range of end effectors.
Research collaborators developing their own inspections systems, control algorithms or end effectors can use the lab to help refine their solutions and develop demonstrators of their technology.
Potential applications for robotics in train maintenance and overhaul
Cleaning
- Interiors
- Train front end
- Underframe
Inspection
- Image recognition
- Surface shape scanning
- Ultrasonics
- Identify broken or missing parts
- Torque check bolts
- Data processing to connect to work planning
- Axle inspection including bearing axlebox cap remove and replace
- Oil sampling
Servicing
- Fuelling
- Sanding
- CET emptying
- Water
Replacing parts or adjusting alignments
- Replace missing bolts/torque tighten
- Changing brake pads
- Replace pantograph carbon strips
- Changing air and oil filters
- Delivering parts and tools to work location
The Rolling Stock Maintenance Robotics Lab

Collaborative Robot Test Bench
Octopuz Simulation and Off-Line Programming
Collaborative Robot Test Bench
As well as the main robot test cell, the SRSRMF includes a collaborative robot test bench which includes a UR10 and UR5 robot, with a range of end effectors and sensors. Collaborative robots are smaller, lower payload robot arms that can work in the same space as human operative. The test bench allows for the development of scaled model proof of concept studies for a range of maintenance tasks which can also be used as demonstrators that can be taken off site. Additionally with UR robots can be mounted on any bespoke frame to develop demonstrators of any maintenance or overhaul activities that require a payload of less than 12 kg.
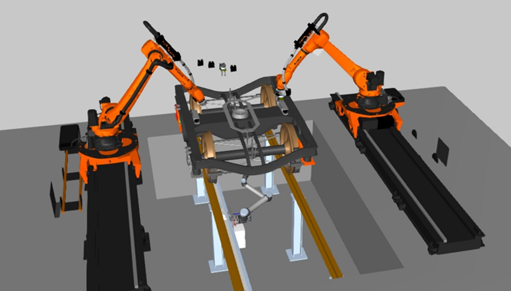
Octopuz Simulation and Off-Line Programming
The SRMRF includes the robotics off-line programming and simulation tool, Octopuz, which allows simulation of multiple robots in a larger working area (e.g. the simulation of a fully automated maintenance depot).
Future research work aims to introduce Artificial Intelligence and Machine Learning to robot control for optimal path finding and control of order of operations to maximise efficiency; one method to develop this is based on Robot Operating System (ROS) which can be integrated with both the physical robot test cell and the simulation tool.

These facilities have been part-funded by the European Regional Development Fund, with the support of the Northern Powerhouse.